Durch seine einfache Integration in Ihre Roboteranlage ermöglicht TCP.control vollautomatisch die kontinuierliche Prüfung und Aktualisierung des Werkzeug-TCP während des
laufenden Produktionsbetriebs. Dadurch wird die Qualität Ihrer Produktion sichergestellt und Stillstands- oder Nacharbeitskosten vermieden.
TCP.control umfasst sämtliche Soft- und Hardwarekomponenten, um den Werkzeug-TCP in regelmäßigen Abständen zu prüfen und bei Bedarf zu aktualisieren.
Dank eines Inbetriebnahmeassistenten gestaltet sich die Integration in Ihre Roboteranlage mühelos.
Innerhalb weniger Minuten ist TCP.control betriebsbereit.
Auswählbare Funktionen ermöglichen bei der Überschreitung einstellbarer Toleranzgrenzen eine Benachrichtigung an eine übergeordnete Steuerung.
Zusätzlich werden die erfassten Ergebnisse übersichtlich in der enthaltenen HMI dargestellt.
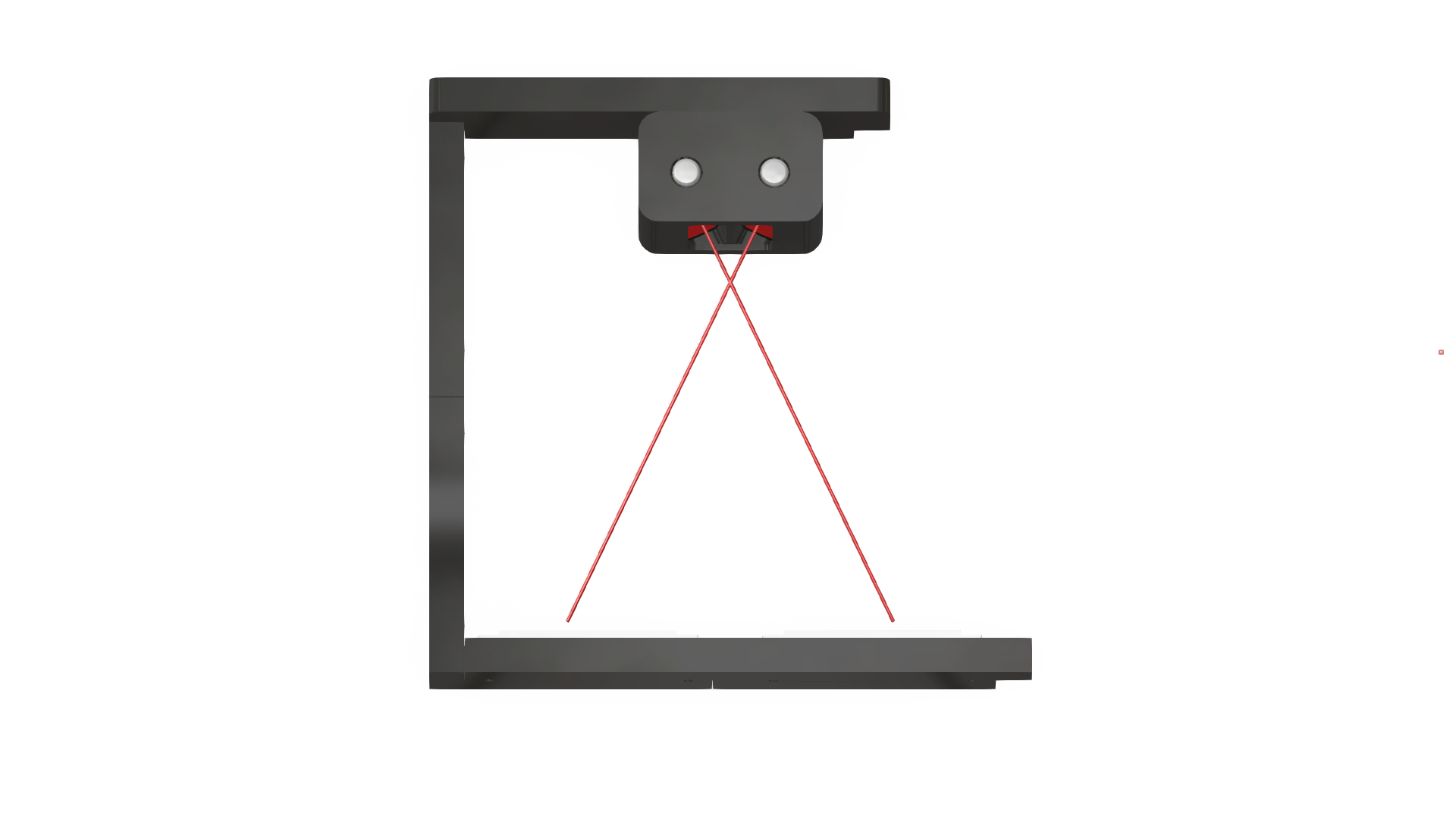
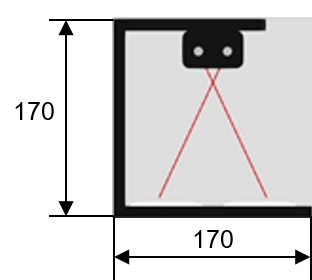
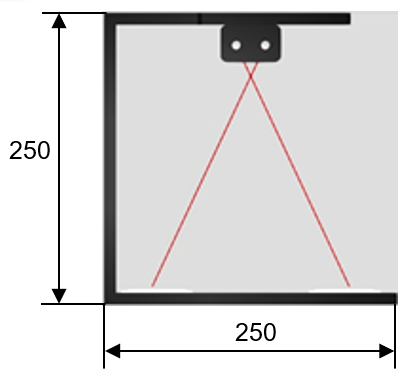
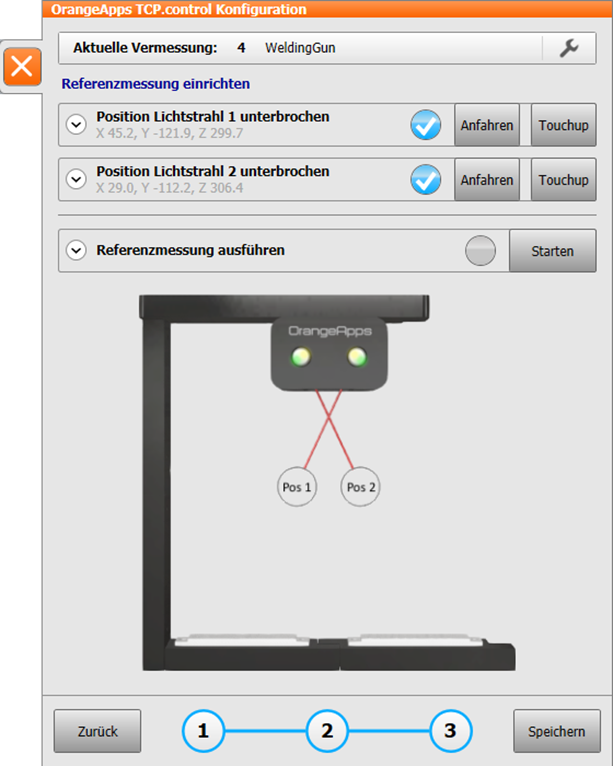
Ein Funktionsaufruf im Roboterprogramm löst die Überprüfung des TCP aus. Der Roboter fährt anschließend zum Sensor und führt innerhalb
weniger Sekunden eine Messung durch, um festzustellen, ob eine Abweichung des TCP im Vergleich zur Referenzmessung vorliegt. Anhand einstellbarer Toleranzgrenzen wird entschieden,
ob die Abweichung akzeptabel ist. Bei Bedarf können die TCP-Daten automatisch aktualisiert werden oder eine Benachrichtigung an eine SPS ausgelöst werden.
Ein Versand der Messdaten per MQTT ist ebenso möglich.
Die Integration in die bestehende Anlage gestaltet sich äußerst unkompliziert, da der Sensor nur minimalen Bauraum beansprucht.
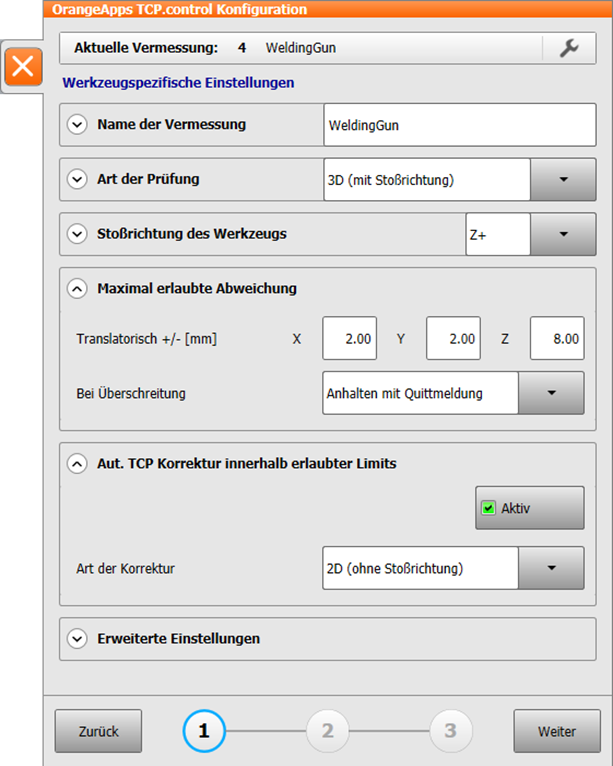
Während der Inbetriebnahme wird im Roboterprogramm die Bewegung zum Sensor definiert und eine Referenzmessung des TCP durchgeführt.
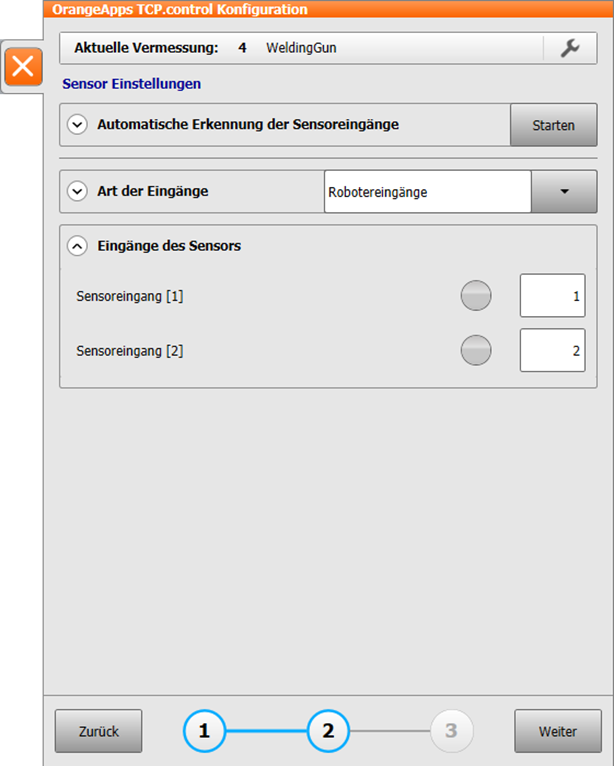
Zusätzlich werden die Messart (2D, 3D), die Nummer der verwendeten digitalen Eingänge sowie die Toleranzgrenzen festgelegt.
Ein Inbetriebnahmeassistent führt bequem durch diese erforderlichen Schritte, die nur wenige Minuten in Anspruch nehmen.
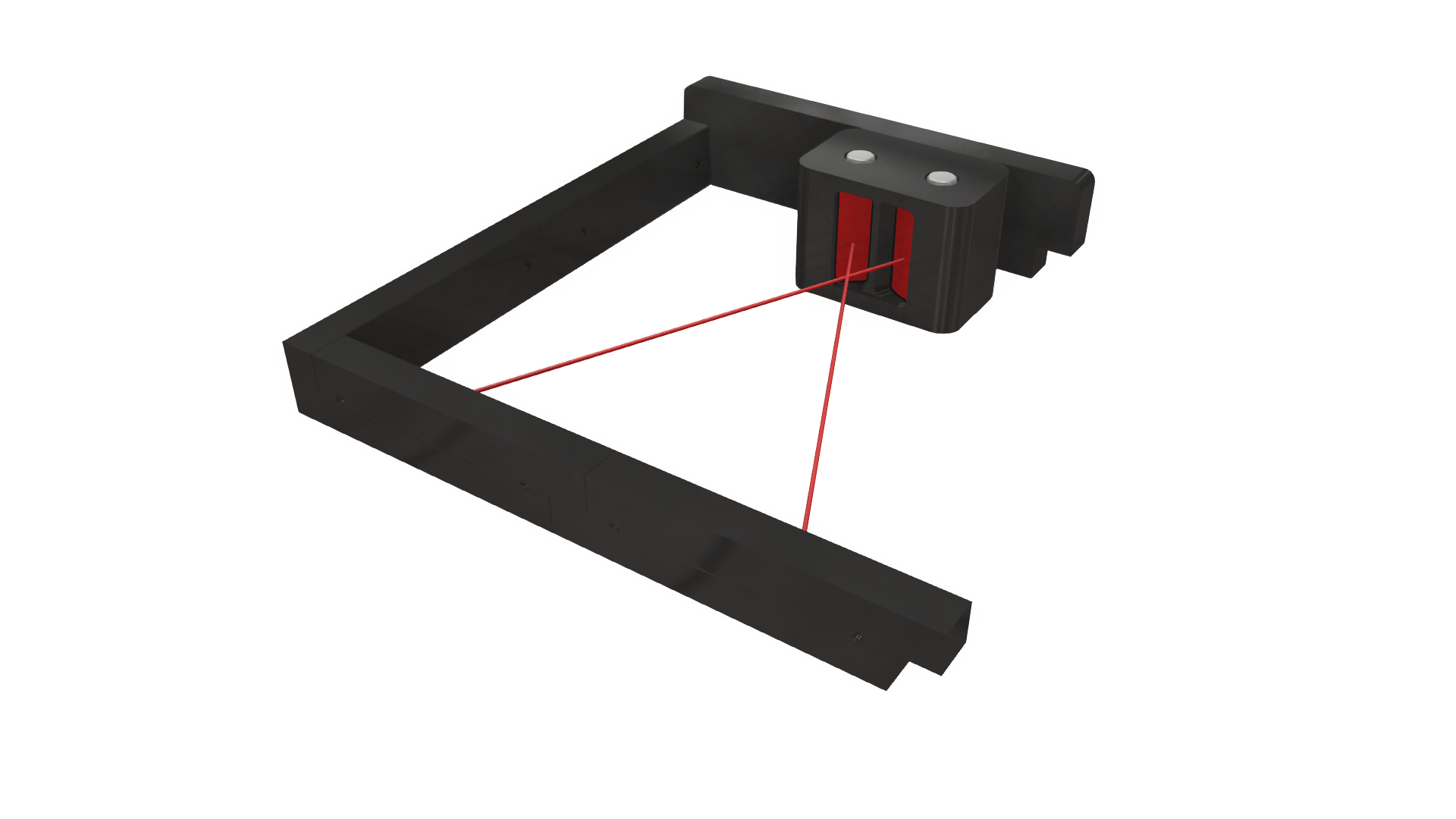
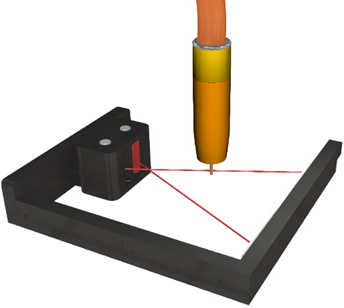
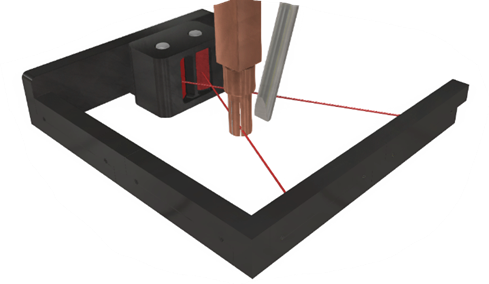
Der Sensor enthält zwei Lasermesssensoren, welche jeweils an einen digitalen Eingang der Robotersteuerung angeschlossen werden. Eine weitere Hardware, wie z.B. eine Auswerteeinheit,
ist nicht erforderlich.
Dem Technologiepaket liegt die benötigte Softwarekomponente bei. Diese kann bequem direkt am Roboter oder über KUKA.WorkVisual installiert werden.
Eine weiteres KUKA Technologiepaket oder sonstige Software wird nicht benötigt.
Es können alle rotationssymetrischen Geometrien vermessen werden, z.B.
- Schweißbrenner
- Schweissdraht
- Punktschweisszange
- Klebedüsen
- Bolzenschweisszangen (auch mit Stützfuss)
- Plasmaschneider
- Fügebolzen
- uvm.
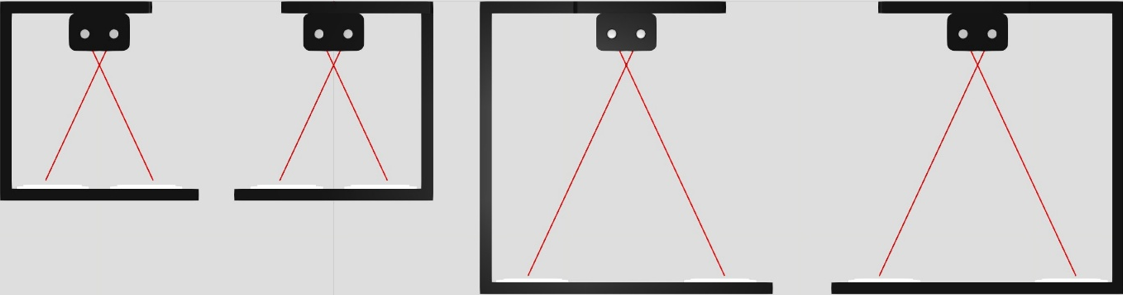
- 2D und 3D TCP-Prüfung von rotationssymetrischen Roboterwerkzeugen
- Auto-TCP-Korrektur innerhalb konfigurierbarer Grenzen
- Durchmesserprüfung
- Darstellung der Messwerte im Anzeige - Plugin
- Maximal 2 Eingänge am Roboter notwendig
- Visualisierung auf dem SmartPAD
- Logfunktion der Messwerte
- Bis zu 64 Werkzeuge (Roboter und externe Werkzeuge)
- Inlineformulare für TCP-Prüfung und Durchmesserprüfung
- Einfache An- und Abschaltung der Messfunktion während des Betriebs
- verschiedene Mitteilungsszenarien bei Überschreitung der definierten Toleranzgrenzen
- keine weitere Hard- oder Software notwendig
- Technologie als Kop für KUKA KSS 8.3, 8.5, 8.6, 8.7
- Bald verfügbar für iiQKA.OS2
- MQTT ready
- Technologiepaket Technologiepaket (KOP) zur einfachen Installation direkt am Roboter oder über KUKA.WorkVisual
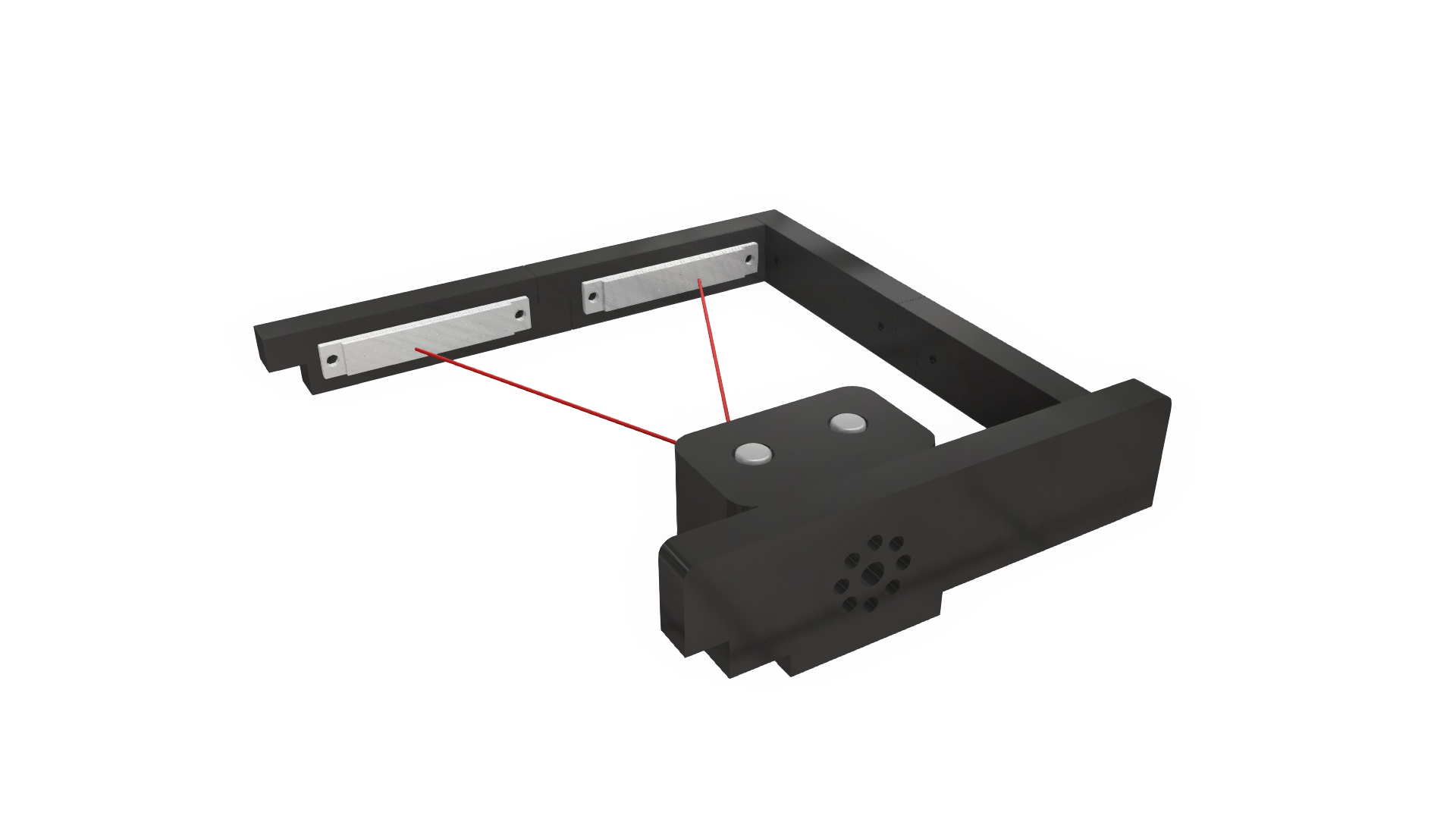
- Sensorgehäuse mit 2 Reflexionslichtschranken
- Reflektorhalter 'Standard' inkl. Montagematerial
- Halter für Aluminiumprofilrohre
- Y-Steckverbinder M12 Stecker / 2x M12 Buchse A-cod. 1x5-polig / 2x 4-polig
- Dokumentation in Deutsch und Englisch
- KUKA KRC4 oder KRC5 Roboter
- bald verfügbar für iiQKA.os2
- Gehäusegröße 52 x 32 x 38 mm (BxTxH)
- Betriebsspannung +UB 10…30V DC
- Lichtart Laser rot (EN 62471)
- Leerlaufstrom I0 ≤ 30mA (je Lichtschranke)
- Ausgangsstrom Ie ≤ 100mA (je Lichtschranke)
- Anschlusskabel 4-polig, M8 x 1 (je Lichtschranke)
KSS 8.3, 8.5, 8.6, 8.7
*Alle Preise in EUR zzgl. 19% MwSt und ggf. Versandkosten.